CS599W System for ML
Simpler version of CS 294 @ Berkeley. (quarter vs. semester)
System aspect of deep learning: faster training, efficient serving, lower memory consumption.
CSE 599W - Systems for ML - 辛酸阅读记录
Intro to DL
Convolution = Spatial Locality + Sharing
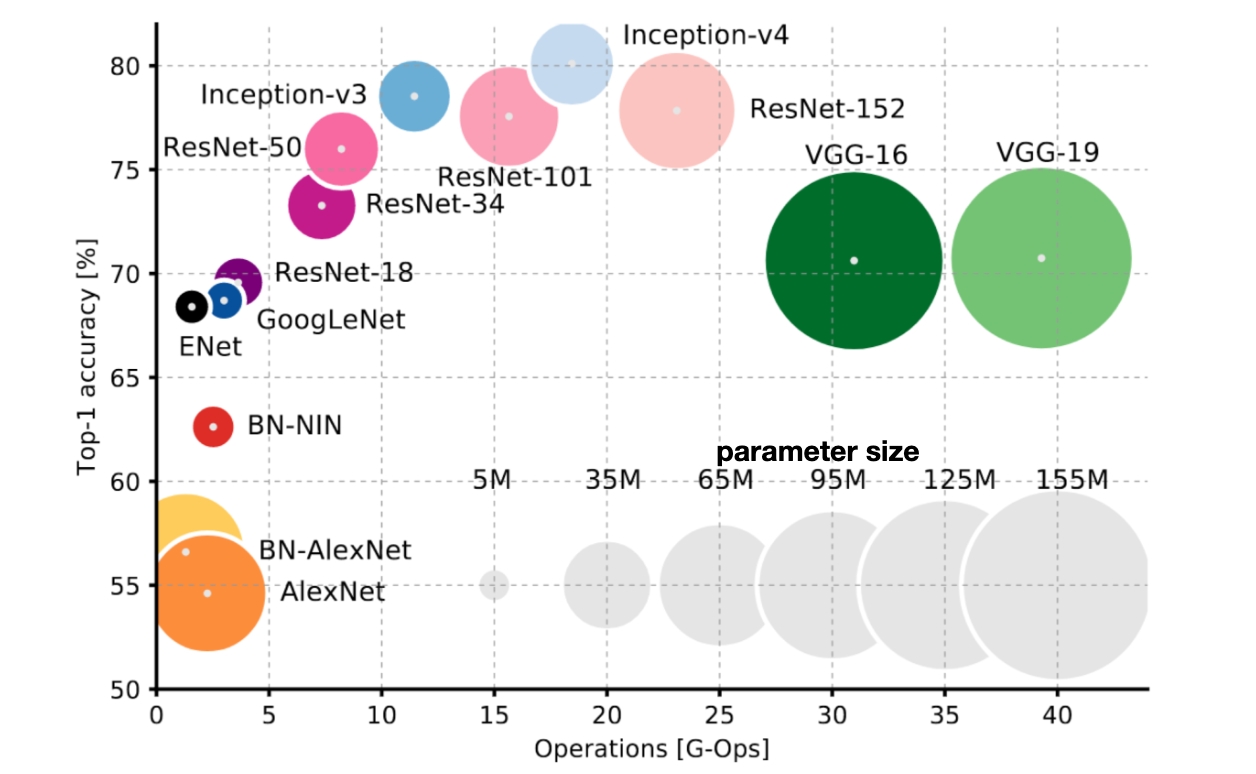
Evolution of CNN
LeNet (LeCun, 1998) - Basic structures: convolution, max-pooling, softmax
Alexnet (Krizhevsky et.al 2012) - ReLU, Dropout
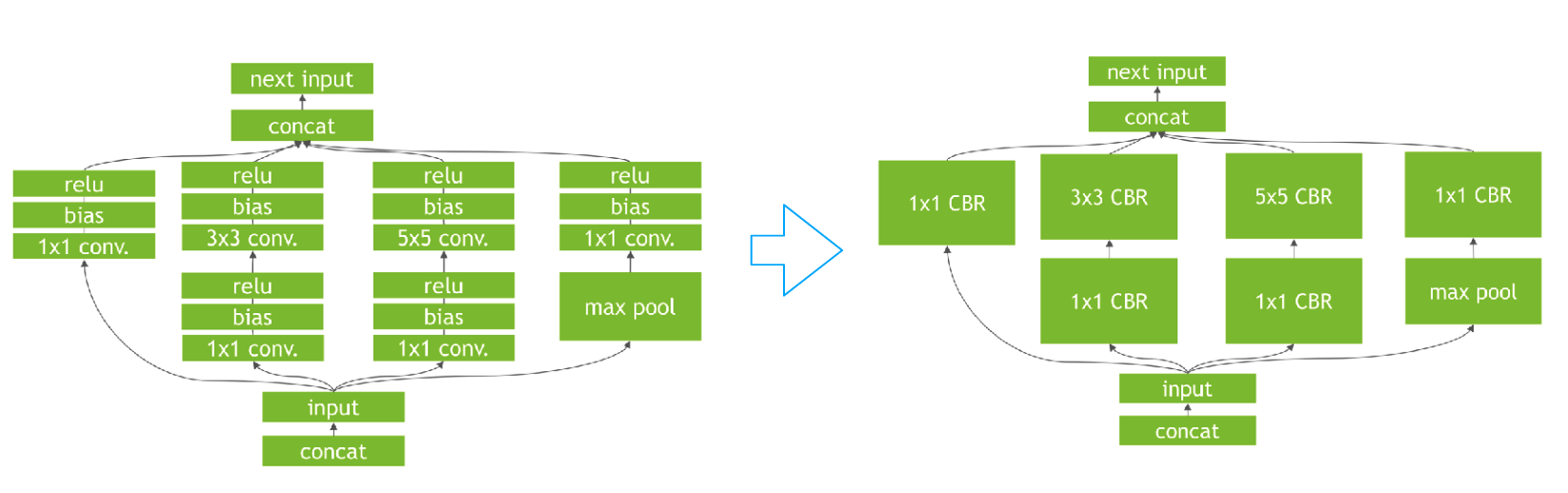
GoogLeNet (Szegedy et.al. 2014) - Multi-independent pass way (Sparse weight matrix)
Inception BN (Ioffe et.al 2015) - Batch normalization
Residual net (He et.al 2015) - Residual pass way
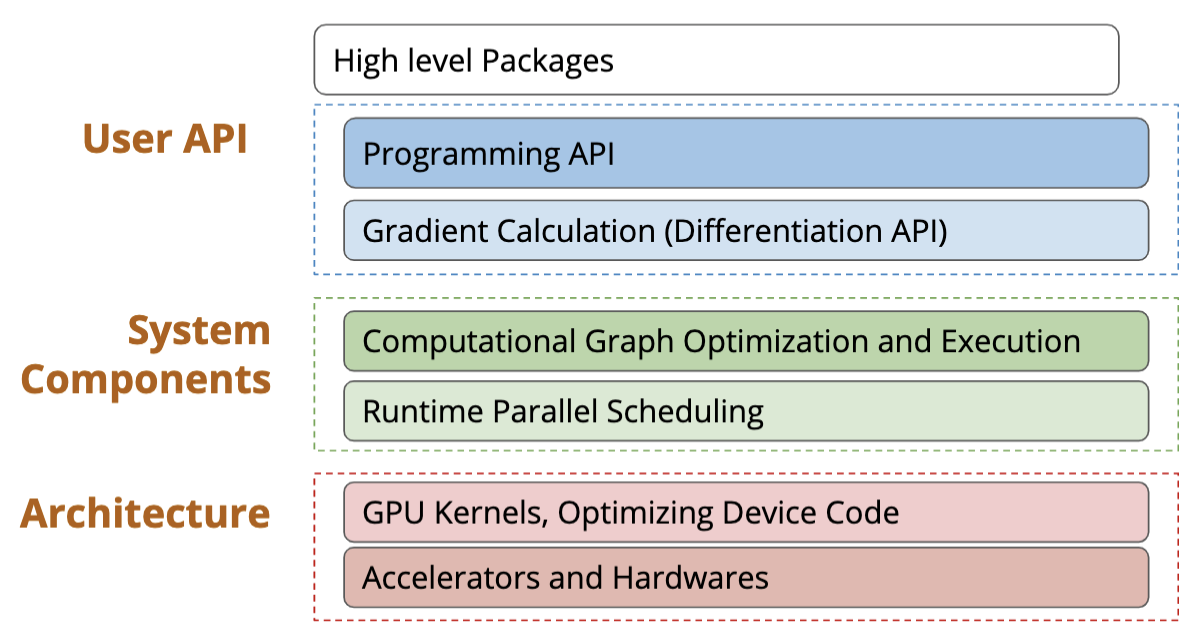
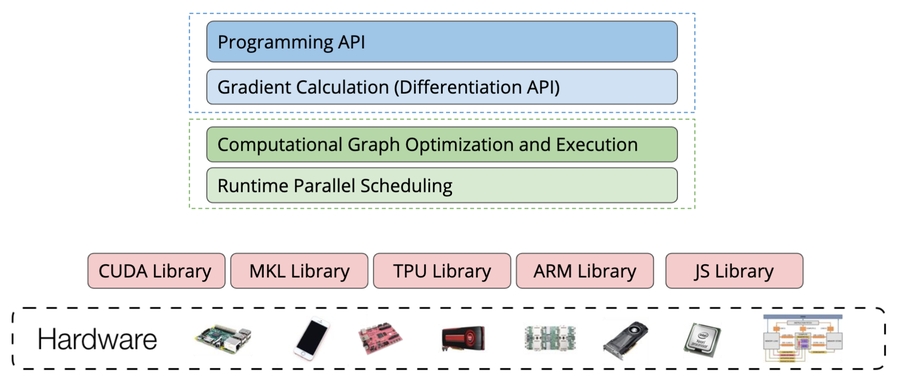
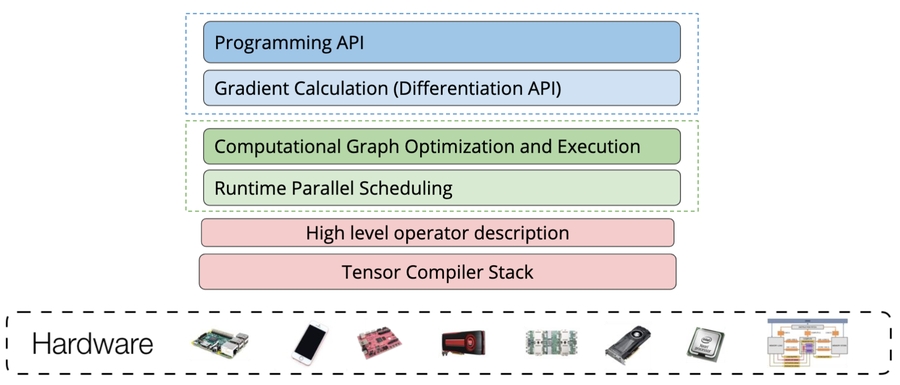
Overview of DL System
User API
Logistic regression in Numpy
Computation in Tensor Algebra
softmax(np.dot(batch_xs, W))Manually calculate the gradient
y_grad = y - batch_ys,W_grad= np.dot(batch_xs.T, y_grad)SGD Update Rule
W = W - learning_rate *W_grad
Logistic regression in Tinyflow
Loss function declaration
Automatic differentiation
Real execution
sess.run
Imperative vs symbolic (declarative)
Imperative-style programs perform computation as you run them - numpy
Symbolic: define the function first, then compile them - Tinyflow
The declarative language - computation graph
Nodes = operation, edge = dependency between ops
Execution only touches needed subgraph
System Components
Computation graph optimization
E.g. deadcode elimination
Memory planning and optimization
Parallel scheduling
Code need to run parallel on multiple devices and worker threads
Detect and schedule parallelizable patterns
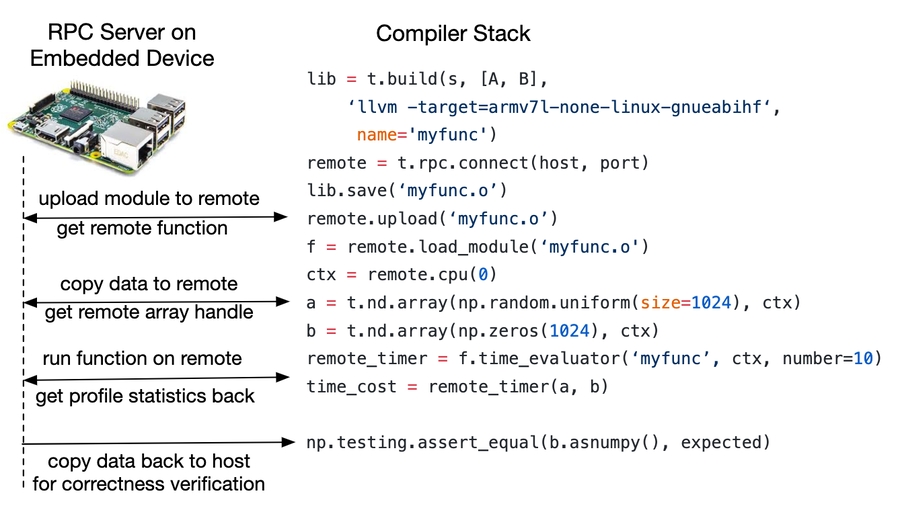
Supporting more hardware backends
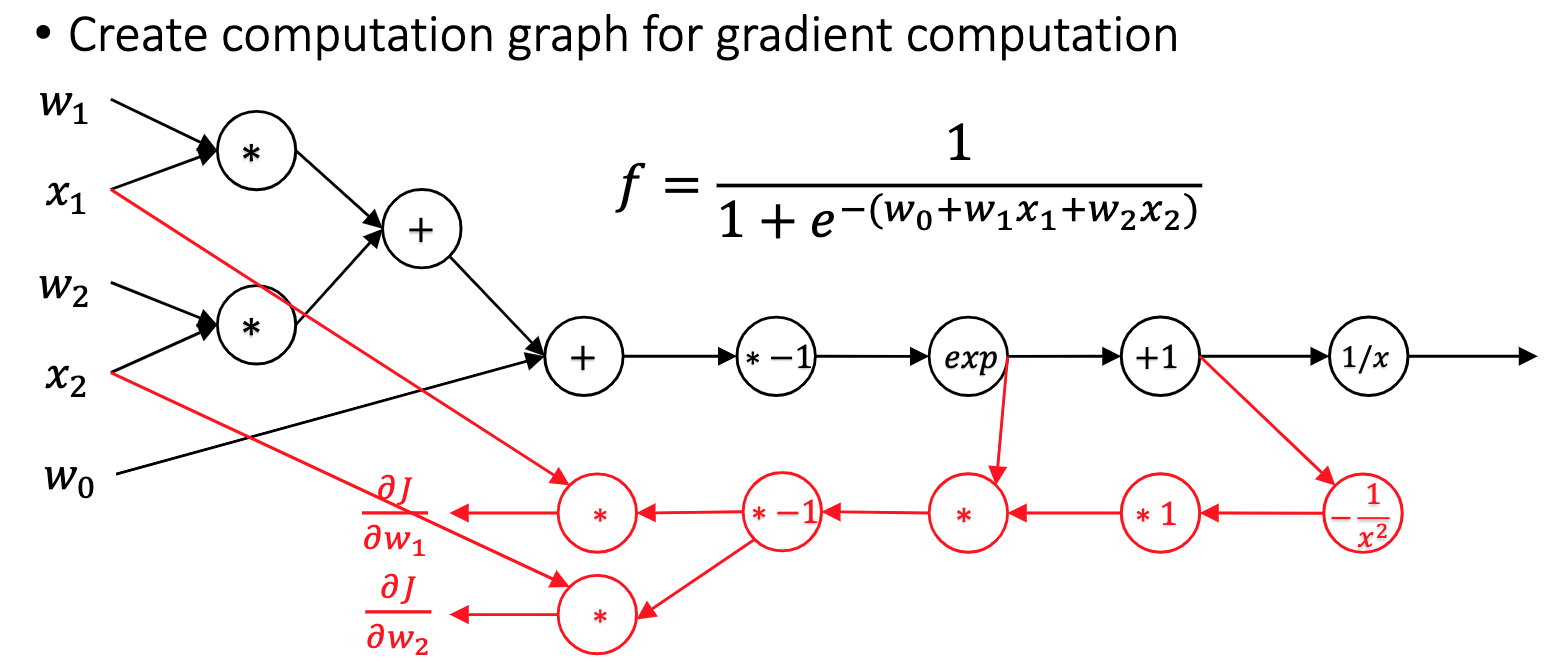
Backpropagation and Automatic Differentiation
Symbolic differentiation
Input formula is a symbolic expression tree (computation graph)
Implement differentiation rules, e.g. sum rule, product rule, chain rule
Cons
For complicated functions, the resultant expression can be exponentially large.
Wasteful to keep around intermediate symbolic expressions if we only need a numeric value of the gradient in the end
Prone to error
Numerical differentiation
Automatic differentiation (autodiff)
AutoDiff algorithm
Recap
Numerical differentiation
Tool to check the correctness of implementation
Backpropagation
Easy to understand and implement
Bad for memory use and schedule optimization
Automatic differentiation
Generate gradient computation to entire computation graph
sBetter for system optimization
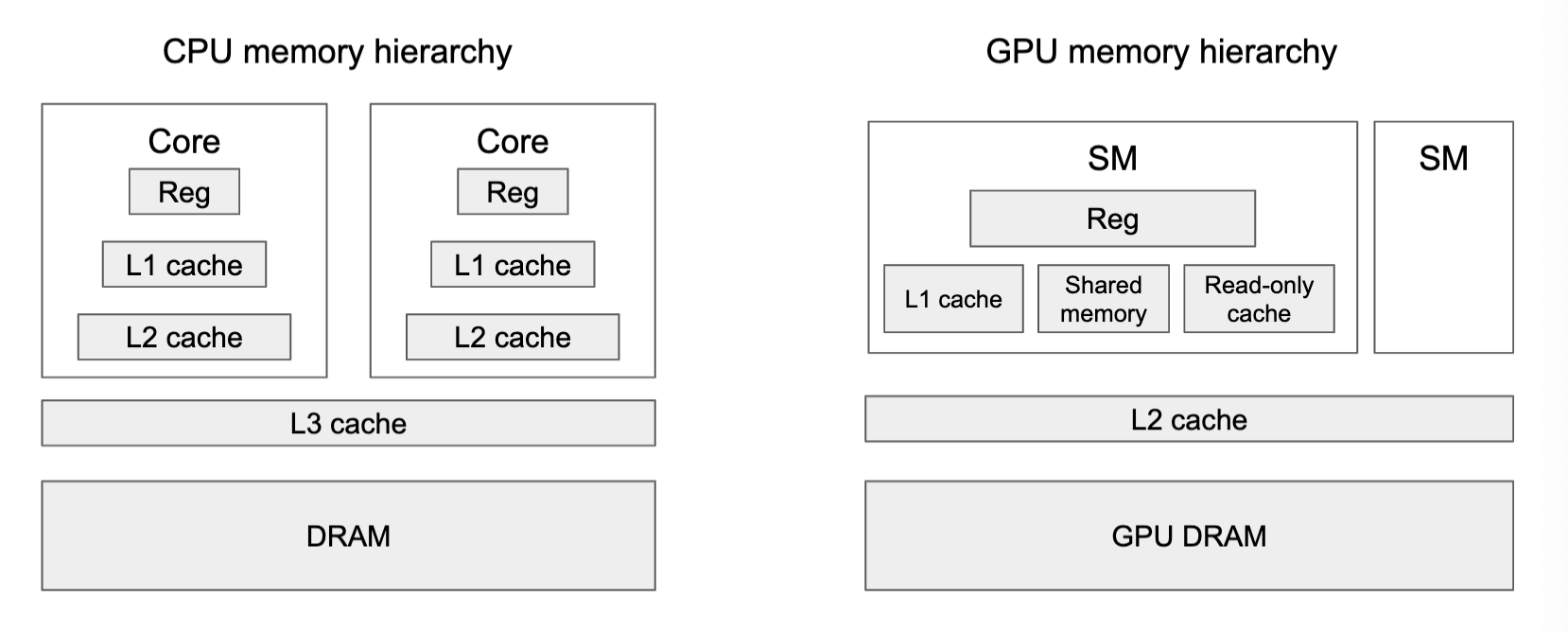
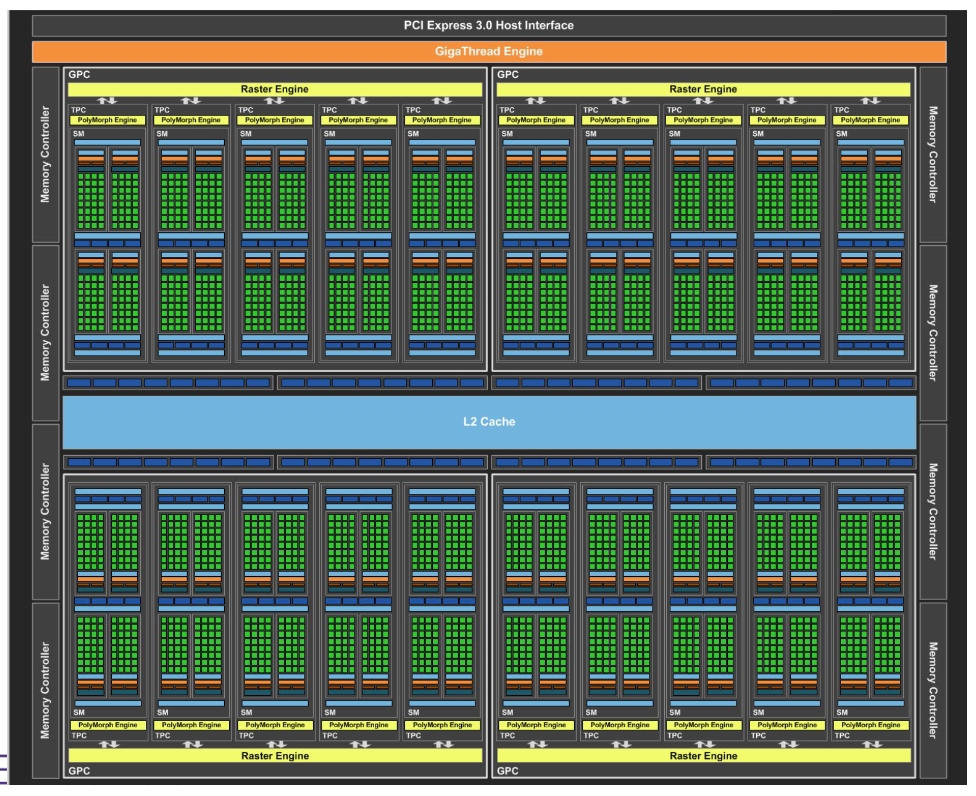
Hardware Backends: GPU
GPU arch
Streaming multiprocessors (SM)
GPU arch
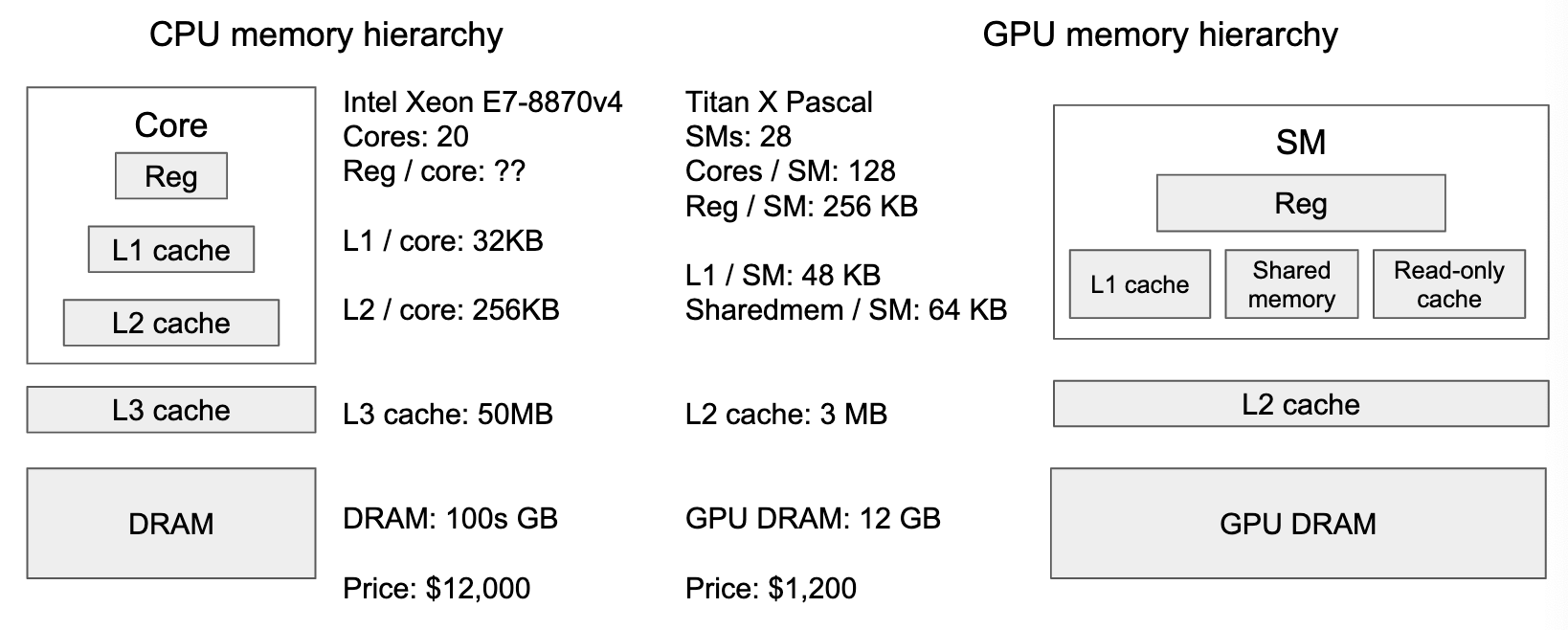
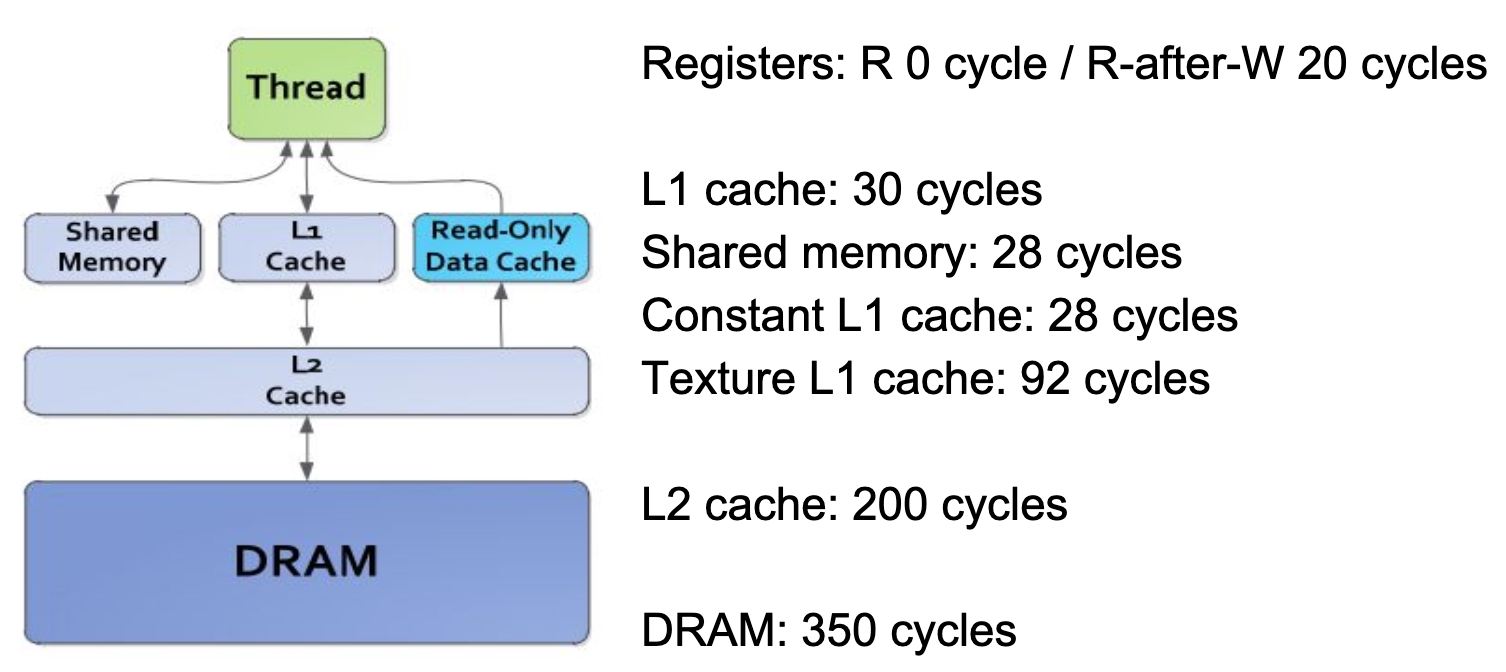
Memory hierarchy
GPU has more registers than L1 cache
L1 cache controlled by programmer
GPU memory latency
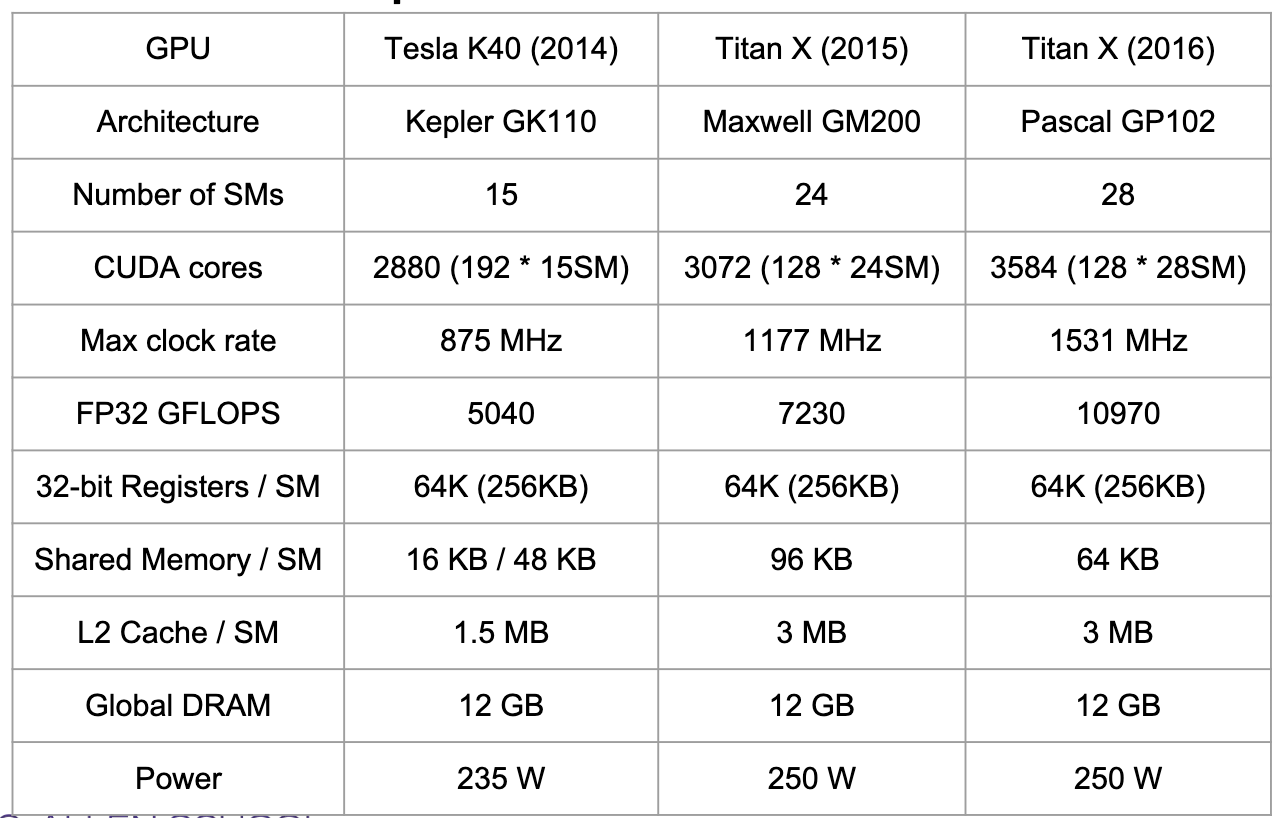
Nvidia GPU comparison
CUDA
Programming model - SIMT
Single instruction, multiple threads
Programmer writes codes for a single thread in simple C program - All threads execute the same code, but can take different paths
Threads are grouped into a block - threads within the same block can synchronize execution
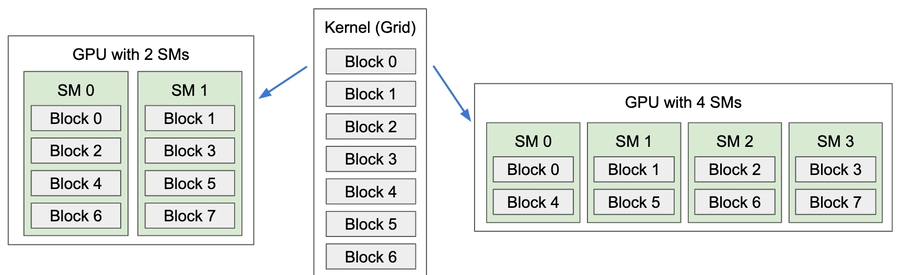
Blocks are grouped into a grid - blocks are independently scheduled on the GPU, can be executed a=in any order
A kernel is executed as a grid of blocks of threads.
One thread -> thread block -> grid = kernel
Kernel execution
Each block is executed by one SM and does not migrate
Several concurrent blocks can reside on one SM depending on block's memory requirement and the SM's memory resources
A warp consists of 32 threads - basic schedule unit in kernel execution
A thread block consists of 32-thread warps
Each cycle, a warp scheduler selects one ready warp and dispatch the warp to CUDA cores to execute?
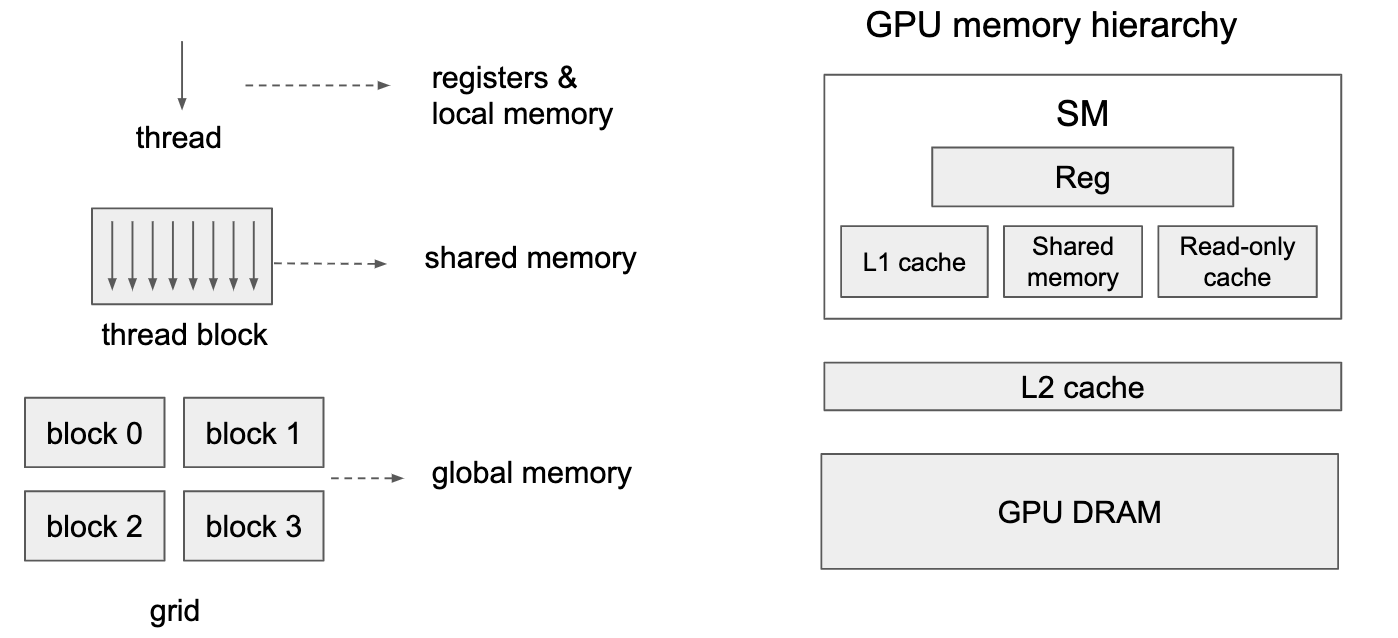
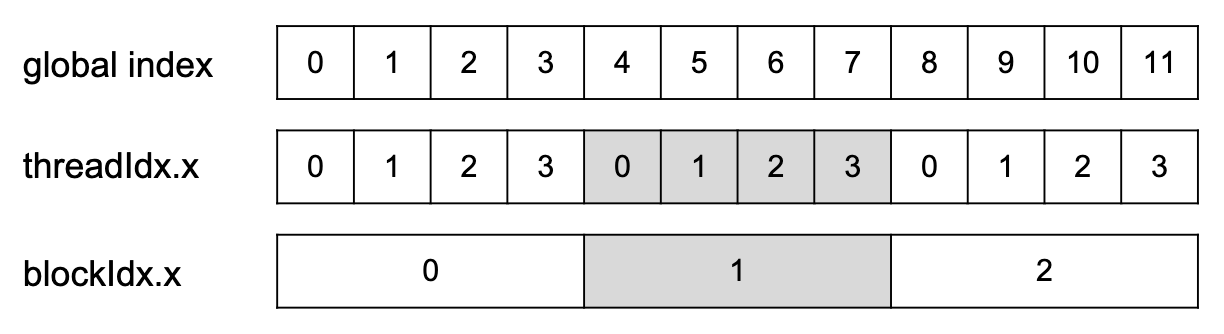
Thread hierarchy & memory hierarchy
Global index = BlockDim * BlockIDx + ThreadIdx
Efficient GPU kernels
GEMM, reduction sum
Tips for high performance
Use existing libraries, which are highly optimized, e.g. cublas, cudnn
Use nvprof or nvvp (visual profiler) to debug the performance
Use high level language to write GPU kernels.
Optimize for Hardware Backends
Gap between computation graph and hardware
GEMM example - memory reuse
Generalize to GPU - reuse among threads
Optimizations = too many variant of operators
Different tiling patterns, fuse patterns, data layout, hardware backends
Explore code generation approach
Intermediate representation (between computation graph and code) - also called domain specific language
DSL
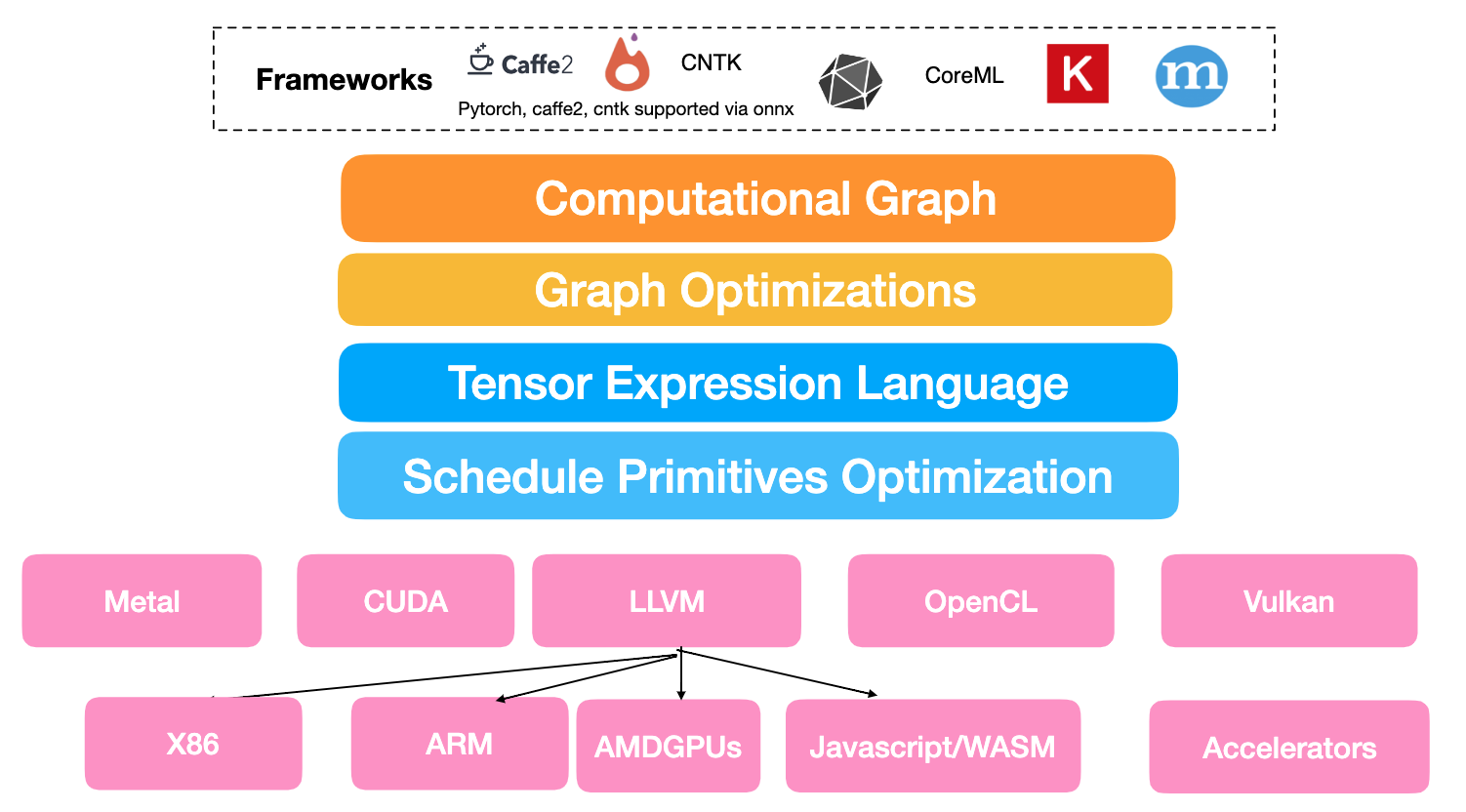
Automatic code generation TVM stack
Computation graph as IR
Represent high-level DL computations
Effective equivalent transformations to optimize the graph
Approach taken by TensorFlow XLA, Intel NGraph, Nvidia TensorRT
XLA - TensorFlow compiler
Constant shape dimension, data layout is specific
Ops are low-level tensor primitives - map, reduce, broadcast, convolution, reduce window
TensorRT - Rule based fusion
Simple graph-based element wise kernel generator
Computation graph optimizations
Need to build and optimize operators for each hardware, variant of layout, precision, threading pattern
Tensor expression language
Emerging tools using tensor expression language
Halide - image processing language
Loopy - python based kernel generator
TACO - sparse tensor code generator
Tensor comprehension
Schedule - Tensor expression to code
Key idea introduced by Halide - separation of compute and schedule
Key challenge - good space of schedule
Should contain any knobs that produce a logically equivalent program that runs well on backend models
Must contain common manual optimizations patterns
Need to actively evolve to incorporate new techniques
TVM schedule primitives
Primitives in prior works Halide, Loopy - loop transformations, thread bindings, cache locality
New primitives for GPU accelerations - thread cooperation, tensorization, latency hiding, ... (still evolving)
Global view of TVM stack
High level compilation frontend - on languages and platforms you choose
A lot of open problems
Optimize for NLP models like RNN, attention
High dimensional convolutions
Low bit and mix precision kernels
More primitive support for accelerators
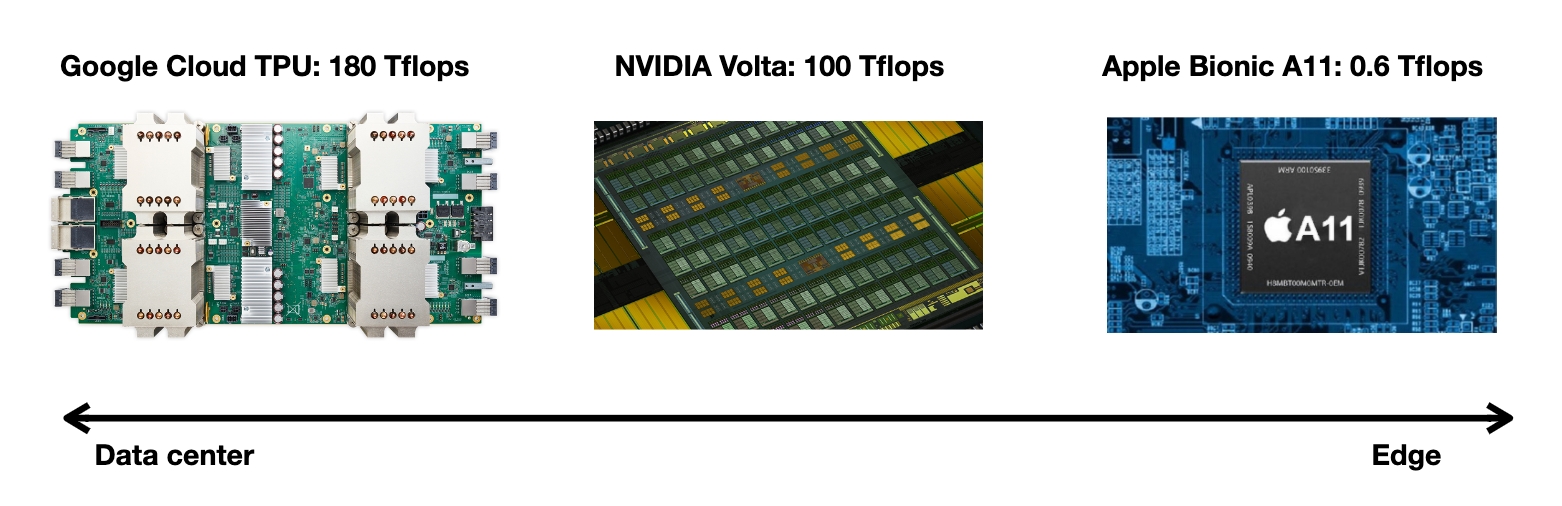
Hardware Specialization in DL
What make TPUs efficient? (- Shows 30-80x improved TOPS/Watt over K80)
Integer inference (saves 6-30x energy over 16bit FP)
Large amount of MACs (25x over K80)
Large amount of on-chip memory (3.5x over K80)
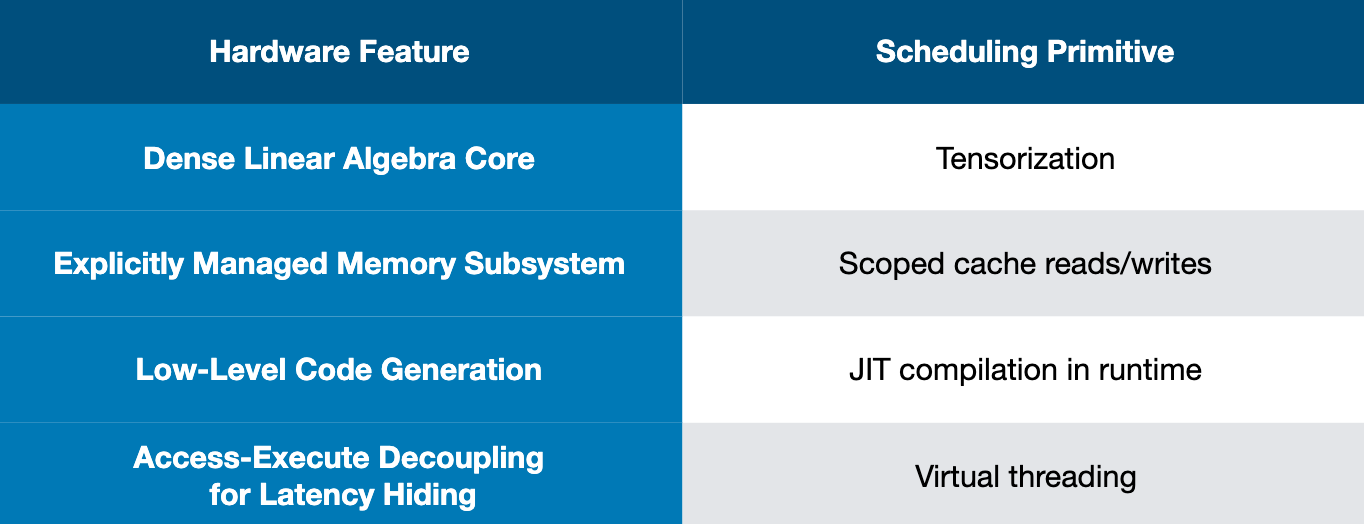
HW/SW co-design
Tensorization
Memory architecting
Data type - Reducing type width can result in a quadratic increase of compute resources, and linear increase of storage/bandwidthBut it also affects classification accuracy
CISC/RISC ISA
Goal: Provide the right tradeoff between expressiveness and code compactness
Use CISC-ness to describe high-level operation (LD, ST, GEMM, ALU)
Use RISC-ness to describe low-level memory access patterns
Micro-op kernels are stored in a local micro op cache to implement different operators
Latency hiding - work partitioning and explicit dependence graph execution (EDGE) unlocks pipeline parallelism to hide the latency of memory accesses
Optimization stack for DL accelerators
Memory Optimization
State-of-art models can be resource bound - The maximum size of the model we can try is bounded by total RAM available of a Titan X card (12G)
Build an executor for a given computation graph
Allocate temp memory for intermediate computation
Traverse and execute the graph by topological order - temporary space linear to # of ops
Dynamic memory allocation
Allocate when needed
Recycle when a memory is not needed - memory pool
Useful for both declarative and imperative executions
Static memory planing
Plan for reuse ahead of time
Analog - register allocation algorithm in compiler
Common pattern of memory planning
Inplace store the result in the input (inplace)
Optimizations - Store the result in the input; Works if we only care about the final result
Pitfalls - we can only do inplace if result op is the only consumer of the current value
Normal memory sharing - reuse memory that is no longer needed (co-share)
Concurrency (heuristics) vs memory optimizations
Sub-linear memory complexity (> sharing > inplace?)
If we check point every K steps on a N layer network
Memory cost = cost per segment + cost to store results = O(K) + O(N/K) 分块
We can get sqrt(N) memory cost plan with one additional forward pass (25% overhead)
Takeaways
Computation graph is a useful tool for tracking dependencies
Memory allocation affects concurrency
We can trade computation for memory to get sub-linear memory plan
Parallel Scheduling
Model parallel training
Map parts of workload to different devices
Require special dependency patterns (wave style, e.g. LSTM)
Data parallelism
Train replicated version of model in each machine
Synchronize the gradient
Parallel program is hard to write. We need an automatic scheduler.
Goal of scheduler interface
Schedule any resources - data flow, memory recycle, random number generator, network communication
Schedule any operation
DAG based scheduler
Explicit push ops and their dependencies
Can reuse computation graph structure
Useful when all results are immutable
Used in typical frameworks (e.g. Tensorflow)
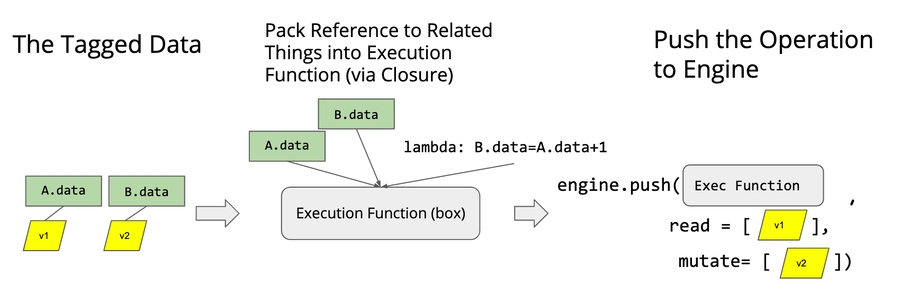
Mutation aware scheduler
Can solve these problems much easier than DAG based scheduler
Tag each resource -> pack refs to related things into execution function via closure -> push ops
Queue based Implementation of scheduler
Take aways
Automatic scheduling makes parallelization easier
Mutation aware interface to handle resource contention
Queue based scheduling algorithm
Distributed Training & Communication Protocols
How to do synchronization over network?
Allreduce - collective reduction
Reduction on common connection topo - all-to-all, ring, tree-shape
Libs, GPUDirect and RDMA
Schedule Allreduce asynchronously
Parameter server
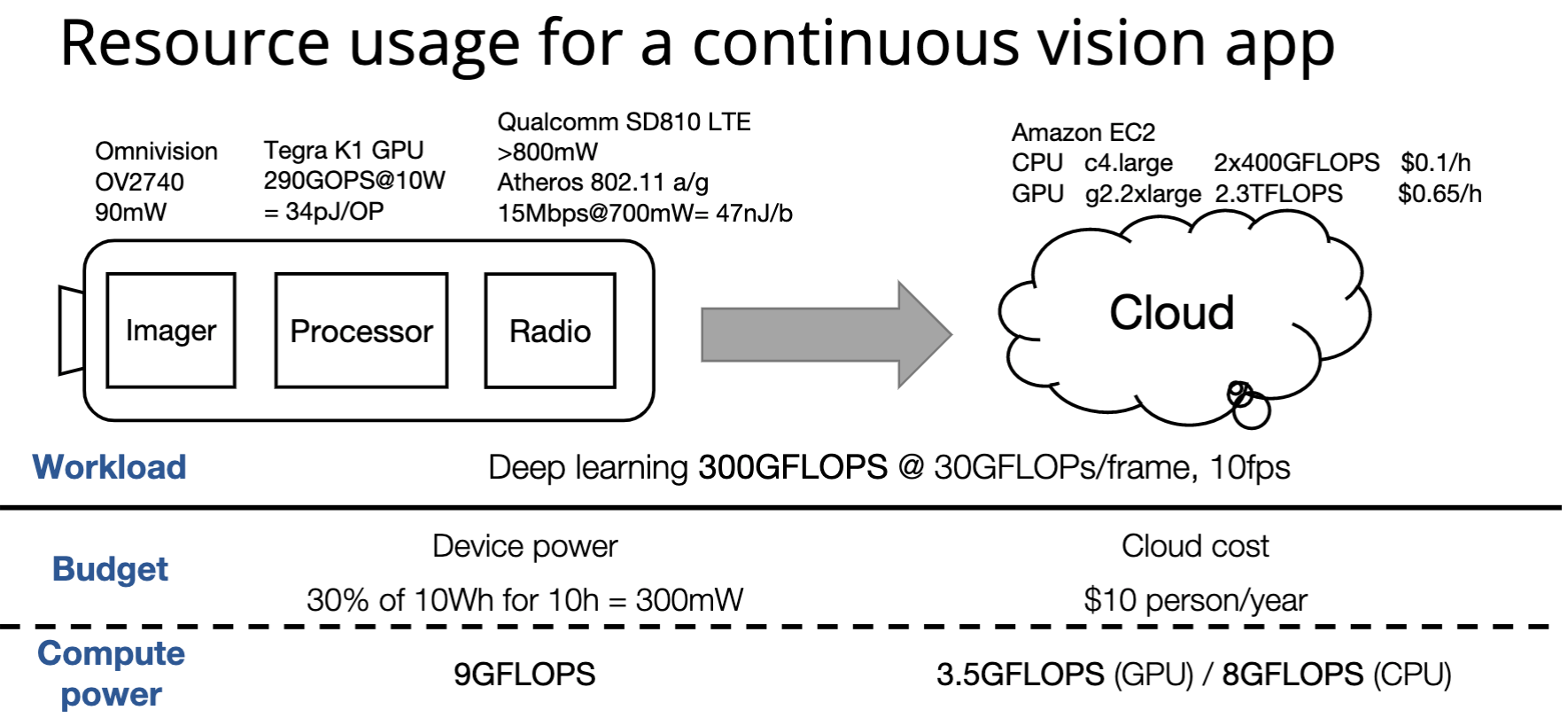
Model Serving
Model serving constraints
Latency
Batch size cannot be as large as possible when executing in the cloud
Can only run lightweight model in the device
Resource
Battery/memory limit for the device
Cost limit for using cloud
Accuracy
Some loss is acceptable by using approximate models
Multi-level QoS
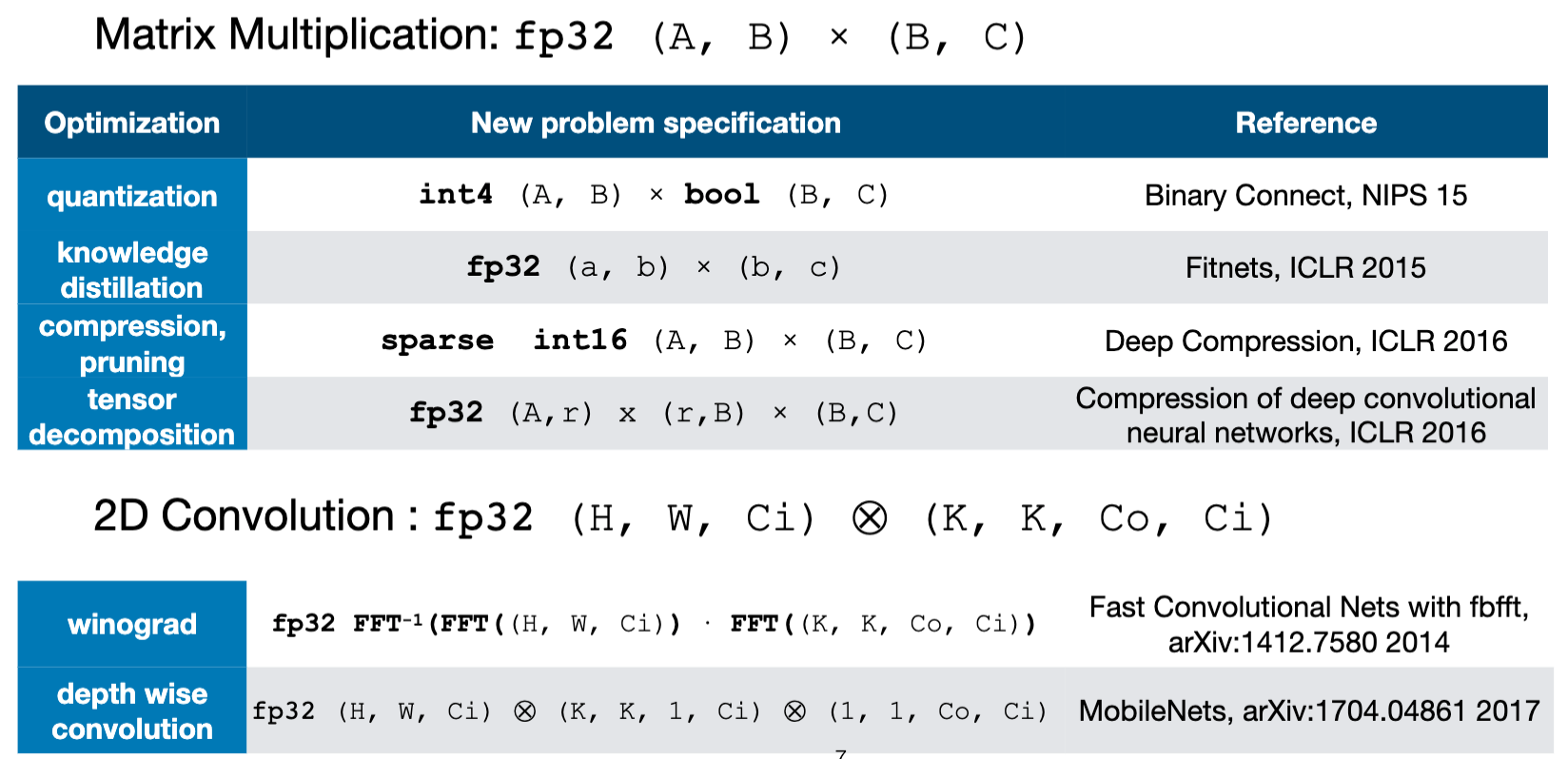
Model compression - Tensor(matrix) decomposition, network pruning, quantization, smaller model (knowledge distillation)
Network pruning - deep compression, prune the connections, weight sharing
Knowledge distillation: use a teacher model (large model) to train a student model (small model)
Serving system
Goals
High flexibility for writing applications
High efficiency on GPUs
Satisfy latency SLA
Challenges
Provide common abstraction for different frameworks
Achieve high efficiency
Sub-second latency SLA that limits the batch size
Model optimization and multi-tenancy causes long tail
Nexus: efficient neural network serving system
Frontend runtime library allows arbitrary app logic
Packing models to achieve higher utilization
A GPU scheduler allows new batching primitives
A batch-aware global scheduler allocates GPU cycles for each mode
High efficiency
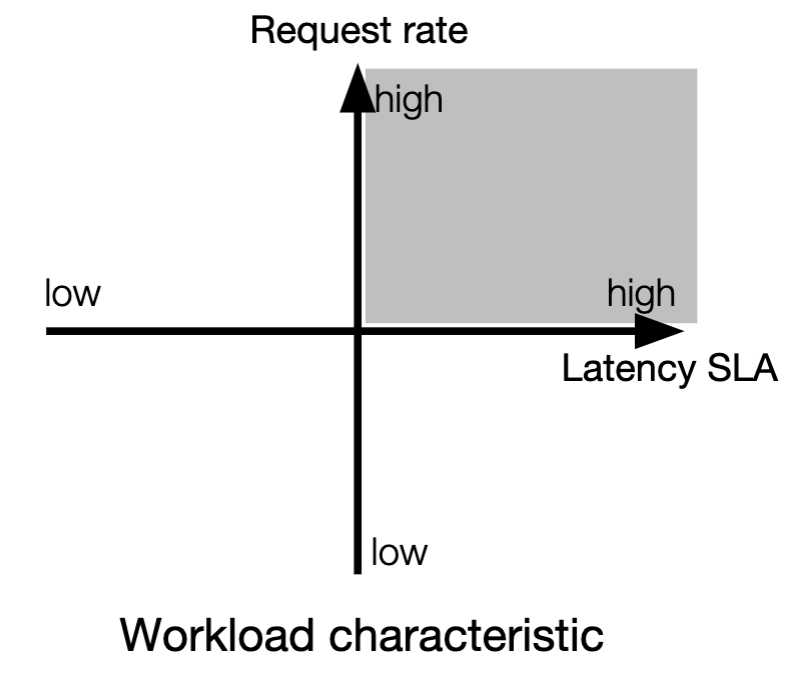
High request rate, high latency SLA workload - saturate GPU efficiency by using large batch size
High request rate, low latency SLA workload - Suppose we can choose a different batch size for each op (layer), and allocate dedicated GPUs for each op. (split batching)
Low request rate, high latency SLA workload
This type of workload cannot saturate GPU in temporal domain
Execute multiple models on one GPU; use larger batch size as latency is reduced and predictive
Low request rate, low latency SLA workload
If saturate GPU in temporal domain due to low latency: allocate dedicated GPU(s)
If not: can use multi-batching to share GPU cycles with other models
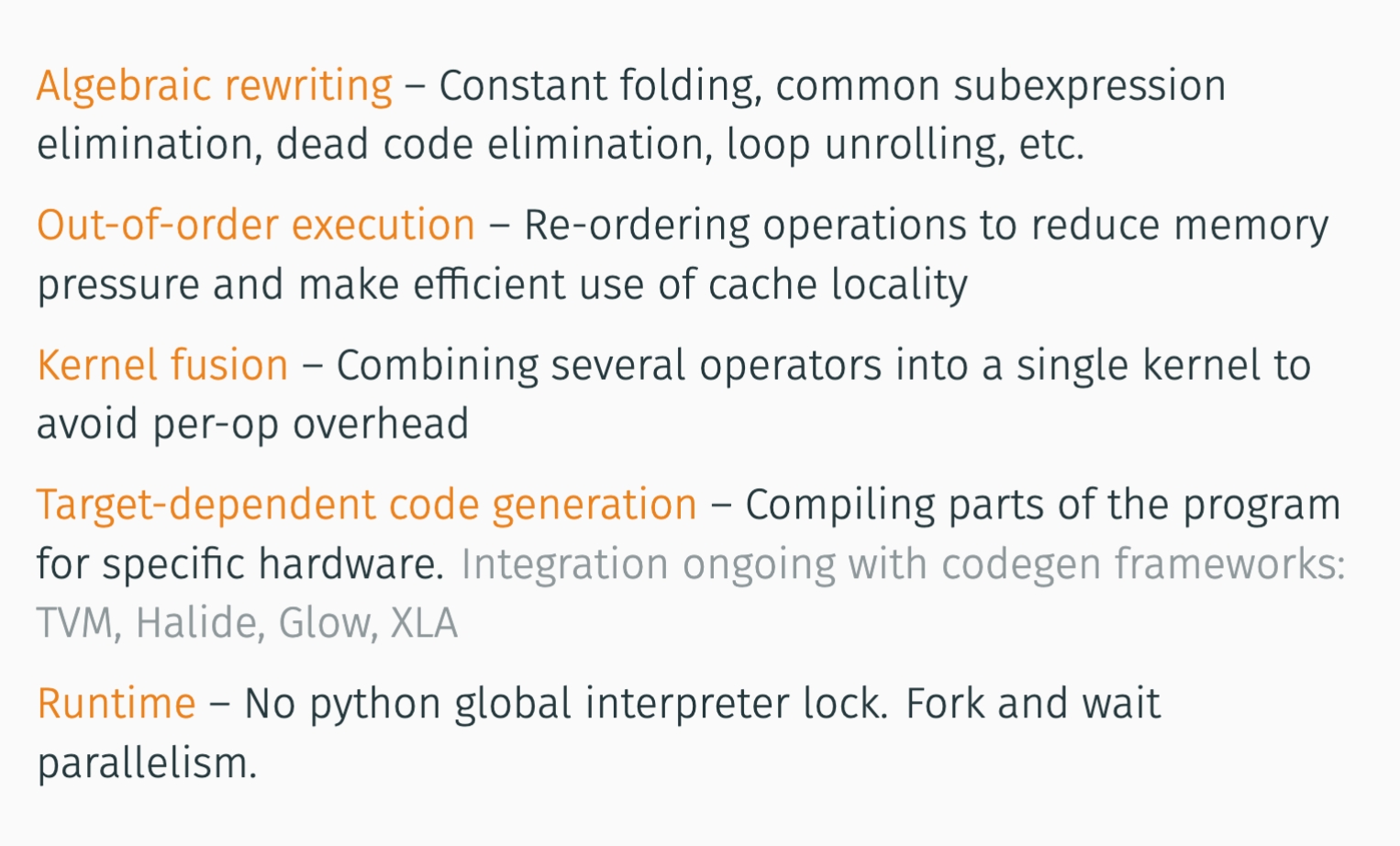
How PyTorch Optimized DL Computations
Compute with PyTorch
Performance Improvements
Last updated